The Russian drone drove 2500 km: what was found out during the experiment?
An experimental drone car from the Russian company NPO StarLine overcame a distance of 10 km in 2500 days. He spent most of the way from St. Petersburg to Kazan in an autonomous mode, only on difficult sections the test driver took control.

The prototype is based on the Skoda Superb and is equipped with a third-level autonomy system with two control modes. The first mode keeps the car in a lane, recognizes the markings, traffic conditions, determines the lane and calculates the route. The second mode is still in the process of being finalized, but it will allow the UAV to move in the foreseeable future in bad weather, the absence of markings and the presence of a large amount of interference (as an example, urban traffic).
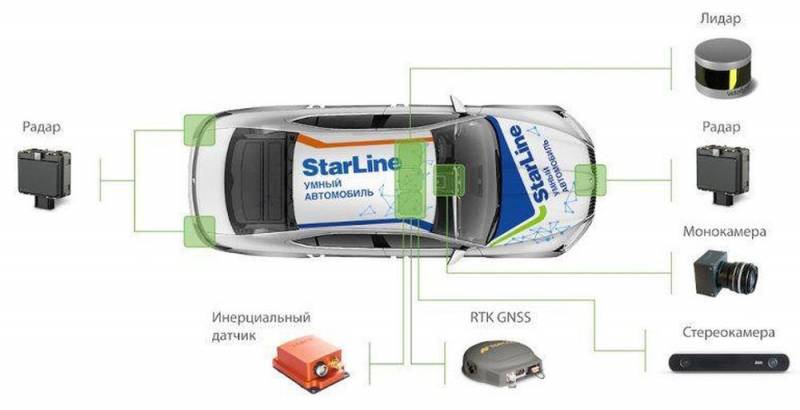
Currently, developers are creating a high-precision map with waypoints. The location can be determined using a satellite receiver, inertial navigation and odometry (this is the use of data on the movement of drives to assess movement). So a whole set of different sensors, from the technical vision system to the lidar, will help the drone move. By the way, the “Sphere” system, about which we Reported earlier, also useful.
By the way, during the experiment, shortcomings were identified. So the test driver really came in handy. Indeed, in some areas, the drone simply could not recognize the roadway. His computer system could not cope with a large amount of information, there were delays, i.e. she "slowed down." But the developers are already actively working to eliminate the shortcomings.

The prototype is based on the Skoda Superb and is equipped with a third-level autonomy system with two control modes. The first mode keeps the car in a lane, recognizes the markings, traffic conditions, determines the lane and calculates the route. The second mode is still in the process of being finalized, but it will allow the UAV to move in the foreseeable future in bad weather, the absence of markings and the presence of a large amount of interference (as an example, urban traffic).
Currently, developers are creating a high-precision map with waypoints. The location can be determined using a satellite receiver, inertial navigation and odometry (this is the use of data on the movement of drives to assess movement). So a whole set of different sensors, from the technical vision system to the lidar, will help the drone move. By the way, the “Sphere” system, about which we Reported earlier, also useful.

By the way, during the experiment, shortcomings were identified. So the test driver really came in handy. Indeed, in some areas, the drone simply could not recognize the roadway. His computer system could not cope with a large amount of information, there were delays, i.e. she "slowed down." But the developers are already actively working to eliminate the shortcomings.
Information